简答题
正确答案
(1)设刀轴矢量a为自由矢量,首先将刀轴矢量的起点移动到工件坐标系的原点,然后将刀轴矢量绕X轴顺时针转到与Z坐标方向一致。
(2)将刀轴矢量a的转动转化为刀具相对于工件的转动:使刀具相对于工件绕X轴逆时针转动角A(逆时针转动可保证转动角A为正),其中A角的计算公式(注意角A的计算一定是从Z轴开始)如下:
(3)求刀心C0经工件转动后在工件坐标系OwXYZ中的位置,设机床的运动坐标值为X、Y、Z,工件绕X轴旋转角为A,则有:(X,Y,Z,1)=(xc0,yc0,zc0,1)T,T为坐标变换矩阵,其值为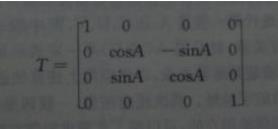
(2)将刀轴矢量a的转动转化为刀具相对于工件的转动:使刀具相对于工件绕X轴逆时针转动角A(逆时针转动可保证转动角A为正),其中A角的计算公式(注意角A的计算一定是从Z轴开始)如下:

(3)求刀心C0经工件转动后在工件坐标系OwXYZ中的位置,设机床的运动坐标值为X、Y、Z,工件绕X轴旋转角为A,则有:(X,Y,Z,1)=(xc0,yc0,zc0,1)T,T为坐标变换矩阵,其值为

答案解析
略