题干本题共包含 3 个小题
简答题第1题
比较关节空间控制器设计和操作空间控制器设计的不同点。
正确答案
操作空间控制器设计时,是通过关节位置确定各关节的旋转角,必须先求出运动方程的正解,进行空间运动后,再求出运动方程的反解。而关节空间控制器设计是直接针对旋转角进行的,不需要对运动方程求正解和反解。
答案解析
略
简答题第2题
给出操作空间及驱动空间的单个关节的机器人控制框图,并说明其控制过程。
正确答案
机器人控制器的控制结构形式,常见的有:集中控制、分散控制和递阶控制等。 如图表示PUMA机器人两级递阶控制的结构图。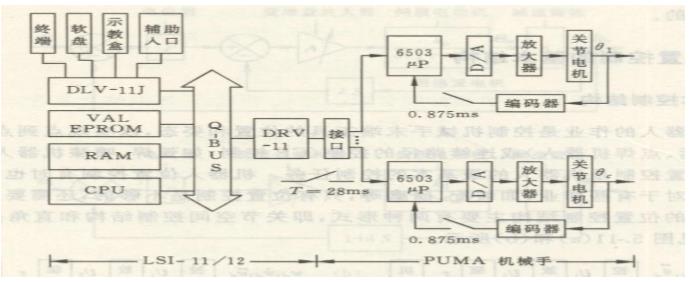
机器人控制系统以机器人作为控制对象,它的设计方法及参数选择,仍可参照一般计算机/嵌入式控制系统。现有的工业机器人大多采用独立关节的PID控制。如图所示PUMA机器人的控制结构即为一典型。
由于独立关节PID控制未考虑被控对象(机器人)的非线性及关节间的耦合作用,因而控制精度和速度的提高受到限制。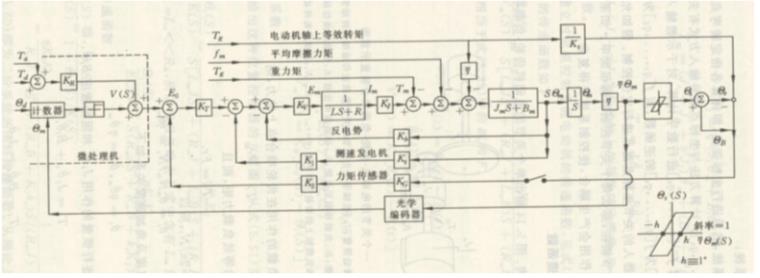
斯坦福机械手具有反馈控制,其一个关节控制方框图如图所示。从图可见,它有个光学编码器,与测速发电机一起组成位置和速度反馈。这种工业机器人是一种定位装置,它的每个关节都有一个位置控制系统。
要提高响应速度,通常是要提高系统的增益以及由电动机传动轴速度负反馈把某些阻尼引入系统,以加强反电势的作用。
要做到这一点,可以采用测速发电机,或者计算一定时间间隔内传动轴角位移的差值。
传递函数:
要提高响应速度,通常是要提高系统的增益以及由电动机传动轴速度负反馈把某些阻尼引入系统,以加强反电势的作用。要做到这一点,可以采用测速发电机,或者计算一定时间间隔内传动轴角位移的差值。由于机器人机械手是通过工具进行操作作业的,所以其末端工具的动态性能将直接影响操作质量。又因末端的运动是所有关节运动的复杂函数,因此,即使每个关节的动态性能可行,而末端的动态性能则未必能满足要求。

机器人控制系统以机器人作为控制对象,它的设计方法及参数选择,仍可参照一般计算机/嵌入式控制系统。现有的工业机器人大多采用独立关节的PID控制。如图所示PUMA机器人的控制结构即为一典型。
由于独立关节PID控制未考虑被控对象(机器人)的非线性及关节间的耦合作用,因而控制精度和速度的提高受到限制。

斯坦福机械手具有反馈控制,其一个关节控制方框图如图所示。从图可见,它有个光学编码器,与测速发电机一起组成位置和速度反馈。这种工业机器人是一种定位装置,它的每个关节都有一个位置控制系统。
要提高响应速度,通常是要提高系统的增益以及由电动机传动轴速度负反馈把某些阻尼引入系统,以加强反电势的作用。
要做到这一点,可以采用测速发电机,或者计算一定时间间隔内传动轴角位移的差值。
传递函数:

要提高响应速度,通常是要提高系统的增益以及由电动机传动轴速度负反馈把某些阻尼引入系统,以加强反电势的作用。要做到这一点,可以采用测速发电机,或者计算一定时间间隔内传动轴角位移的差值。由于机器人机械手是通过工具进行操作作业的,所以其末端工具的动态性能将直接影响操作质量。又因末端的运动是所有关节运动的复杂函数,因此,即使每个关节的动态性能可行,而末端的动态性能则未必能满足要求。
答案解析
略
简答题第3题
分析讨论工业机器人的位置控制、速度控制、加速度控制和力控制的特点及其区别。
正确答案
位置控制:工业机器人位置控制的目的,就是要使机器人各关节实现预先所规划的运动,最终保证工业机器人终端(手爪)沿预定的轨迹运行。
这类运动控制的特点是连续控制工业机器人手爪(或工具)的位姿轨迹。
一般要求速度可控、轨迹光滑且运动平稳。轨迹控制的技术指标是轨迹精度和平稳性。
速度控制意味着各个关节马达的运动联合进行,并以不同的速度同时运行以保证夹手沿着笛卡尔坐标轴稳定运动。
分解运动速度控制先把期望的夹手运动分解为各个关节的期望速度,然后对各个关节实行速度伺服控制。
加速度控制分解运动加速度控制首先计算出工具的控制加速度,然后把它分解为相应的各个关节加速度,再按照动力学方程计算出控制力矩。
力控制除了在一些自由度方向进行位置控制外,还需要在另一些自由度方向进行力控制。
这类运动控制的特点是连续控制工业机器人手爪(或工具)的位姿轨迹。
一般要求速度可控、轨迹光滑且运动平稳。轨迹控制的技术指标是轨迹精度和平稳性。
速度控制意味着各个关节马达的运动联合进行,并以不同的速度同时运行以保证夹手沿着笛卡尔坐标轴稳定运动。
分解运动速度控制先把期望的夹手运动分解为各个关节的期望速度,然后对各个关节实行速度伺服控制。
加速度控制分解运动加速度控制首先计算出工具的控制加速度,然后把它分解为相应的各个关节加速度,再按照动力学方程计算出控制力矩。
力控制除了在一些自由度方向进行位置控制外,还需要在另一些自由度方向进行力控制。
答案解析
略
相似试题
工业机器人运动自由度数,一般()
单选题查看答案
在工业机器人的设计中,()是理论分析阶段要进行的工作之一。
单选题查看答案
瓦特蒸汽机是一种成本效益合理的动力机器,它改变了人类过去完全靠人力、畜力、水力作为主要动力的历史,形成了一个以动力技术为主导技术,以机器加工、蒸汽动力、机械制造、铁路运输和钢铁冶炼等技术为主导技术群的技术体系,从而引发了第一次技术革命,把人类从手工业时期带到了机器时代。该案例说明()
单选题查看答案
当代机器人大军中最主要的机器人为()。
单选题查看答案
已知五自由度教学机器人,采用直流电机控制,关节转角反馈采用电位计,具有手动示教、再现功能,可以使用PC机集中控制或者分级式单片机控制,试分析比较两种控制方案的优缺点。
简答题查看答案
当代机器人家族中,用于生产制造的机器人为()
单选题查看答案