简答题
正确答案
考虑到车辆当前行驶的道路在数字地图上并不存在、或者车辆驶出道路的情况,算法中包括两种工作模式:“捕获”模式和“跟踪”模式。
捕获模式是指正在寻找真实道路。
跟踪模式则是跟踪由捕获模式下寻找到的真实路段。跟踪模式包括两个状态:车辆在道路上和车辆在节点处。
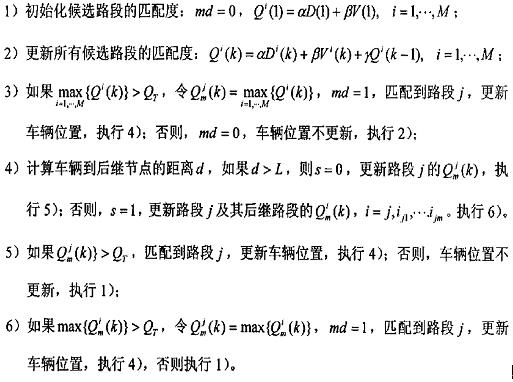
用md表示算法当前的工作模式,md=0表示捕获模式,and=1表示跟踪模式,用s表示当前车辆状态,s=0表示车辆在道路上,s=l表示车辆在节点处,并设当前位置的候选路段有M个,则地图匹配算法完整的描述如下:
捕获模式是指正在寻找真实道路。
跟踪模式则是跟踪由捕获模式下寻找到的真实路段。跟踪模式包括两个状态:车辆在道路上和车辆在节点处。
用md表示算法当前的工作模式,md=0表示捕获模式,and=1表示跟踪模式,用s表示当前车辆状态,s=0表示车辆在道路上,s=l表示车辆在节点处,并设当前位置的候选路段有M个,则地图匹配算法完整的描述如下:

答案解析
略
相似试题
什么是地图匹配?基本思想是什么?地图匹配应用的两个基本前题是什么?地图匹配的算法处理过程?
简答题查看答案
什么是影像匹配?将数字影像匹配基本算法分为两类,说明分类标准,并指出其中哪种算法最好,为什么?
简答题查看答案
有哪些影像匹配基本算法?其中哪一种算法较好?为什么?
简答题查看答案
基于特征的影像匹配的基本过程:建立金字塔影像、()、特征描述、特征匹配。
填空题查看答案
基于特征的影像匹配有什么特点和优点?
简答题查看答案
什么是特征匹配?它与基于灰度的影像匹配有什么不同?结合课间编程实习内容,请说明实现自动相对定向的方法原理和关键技术。
简答题查看答案
基于分层地图的路线规划算法对道路网络的分层规则要求具备哪些特点和假设?
简答题查看答案
车载GPS导航系统接收GPS卫星中的数据信息,结合导航仪内的电子地图,通过GPS卫星信号确定的位置坐标与此相匹配,进行确定汽车在电子地图中的准确位置,这就是平常所说的定位功能。
判断题查看答案
简述分梳辊速度与转杯真空度应如何进行匹配?为什么要这样匹配?
简答题查看答案